Filtering#
Principle#
Passthrough filter#
The passthrough filter create boundaries outside which the points are removed :
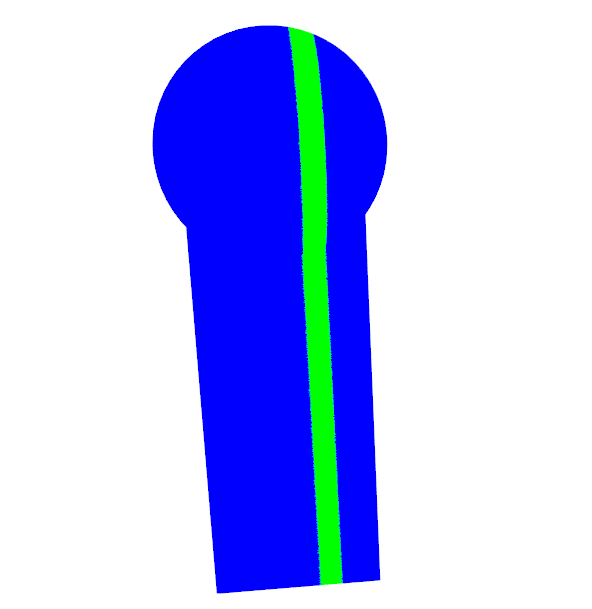
Green points are the ones retained after filtering on Z axis#
The corresponding method is the following :
1/**
2 * @brief Filter points outside given box along said axis
3 * @tparam PointT Should be a pcl::PointXYZxxx
4 * @param cloud Input cloud
5 * @param filt_cloud Output cloud
6 * @param axis Axis on which it has to be filtered given ba Axis_t::Axis_e::x/y/z
7 * @param lowlimit Axis min value
8 * @param uplimit Axis max value
9 * @param verbose If has to output debug on console
10*/
11template <typename PointT>
12void passthroughFilterCloud(typename pcl::PointCloud<PointT>::Ptr& cloud, typename pcl::PointCloud<PointT>::Ptr& filt_cloud, Axis_t axis, float lowlimit, float uplimit, bool verbose = 0);
To use it, do as follow :
1passthroughFilterCloud<pcl::PointXYZ>(baseCloud, compCloud, Axis_t::Axis_e::z, 2, 4);
Radius outlier removal#
The radius outlier removal check the number of neighbors each point has in a sphere of given radius. If the point has not enough points close to it, it is considered as an outlier.

Radius outlier removal, red points have no neighbors in radius, blue have 1 and green has 2#
The corresponding method is the following :
1/**
2 * @brief Remove outliers that do not have k neighbors in given sphere radius
3 * @tparam PointT Should be a pcl::PointXYZxxx
4 * @param cloud Input cloud
5 * @param filt_cloud Output cloud
6 * @param radius Sphere radius to check neighbor in
7 * @param minPointsInRadius K neighbors required not to be an outlier
8 * @param verbose If has to output debug on console
9*/
10template <typename PointT>
11void radiusOutlierRemoval(typename pcl::PointCloud<PointT>::Ptr& cloud, typename pcl::PointCloud<PointT>::Ptr& filt_cloud, float radius, unsigned int minPointsInRadius, bool verbose = 0);
To use it, do as follow :
1radiusOutlierRemoval<pcl::PointXYZ>(mynewcloud, mynewcloud_filtered, 3, 10);
Statistical outlier removal#
For each point, compute mean distance from their k neigbors
Do global mean
Each point having their mean distance outside the interval [mean-stdDev:mean+stdDev] will be removed
The passthrough filter create boundaries outside which the points are removed.

Statistical removing of points, https://pcl.readthedocs.io/en/latest/statistical_outlier.html#
The corresponding method is the following :
1/**
2 * @brief Removes outliers based on statistics of whole cloud
3 * @tparam PointT Should be a pcl::PointXYZxxx
4 * @param cloud Input cloud
5 * @param filt_cloud Output cloud
6 * @param meanK Number of near neighbors to analyze
7 * @param stdDevMultThresh All points who have a distance larger than stdDevMultThresh standard deviation of the mean distance to the query point will be removed
8 * @param verbose If has to output debug on console
9*/
10template <typename PointT>
11void statisticalOutlierRemoval(typename pcl::PointCloud<PointT>::Ptr& cloud, typename pcl::PointCloud<PointT>::Ptr& filt_cloud, unsigned int meanK, float stdDevMultThresh, bool verbose = 0);
To use it, do as follow :
1statisticalOutlierRemoval<pcl::PointXYZ>(mynewcloud, mynewcloud_filtered, 40, 1);
Conditional remover#
Euclidean clustering#
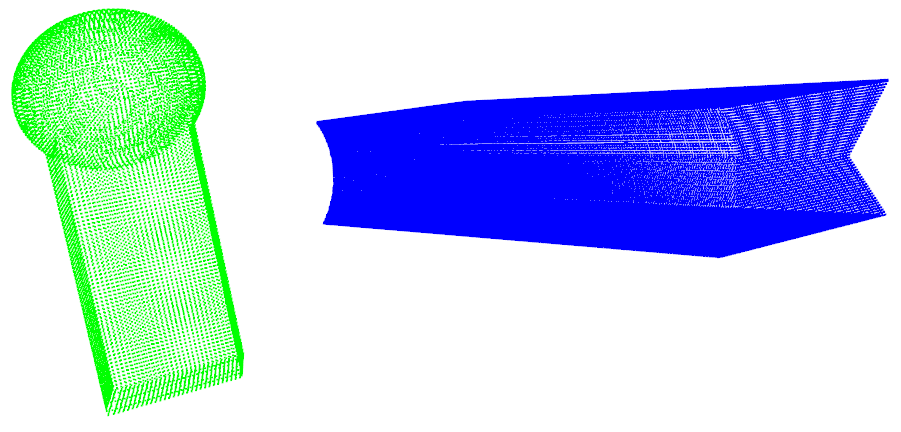
Blue and green parts are two different clusters#
The corresponding method is the following :
1/**
2 * @brief Extract clusters from given cloud based on density
3 * @tparam PointT Should be a pcl::PointXYZxxx
4 * @param cloud Cloud to extract clusters from
5 * @param indices New vector to store indices of clusters
6 * @param tolerance Tolerance in [m] to look points around
7 * @param minpointsinclust Minimal points for a cluster to be considered
8 * @param maxpointsinclust Maximal points for a cluster to be considered (if 0 -> no limit)
9 * @param verbose If has to output debug on console
10*/
11template <typename PointT>
12void euclideanClustering(typename pcl::PointCloud<PointT>::Ptr& cloud, std::vector<pcl::PointIndices>& indices, float tolerance, unsigned int minpointsinclust = 50, unsigned int maxpointsinclust = 0, bool verbose = false);
To use it, do as follow :
1std::vector<pcl::PointIndices> cluster_indices;
2euclideanClustering<pcl::PointXYZ>(mycloud, cluster_indices, 6, 50, 0);
3// Different clusters are accessed with cluster_indices[n]
4
5// To recreate clouds from them :
6std::vector<pcl::PointIndices> cluster_indices;
7std::vector<pcl::PointCloud<pcl::PointXYZ>> clustered_clouds;
8// Find clusters
9euclideanClustering<pcl::PointXYZ>(mycloud, cluster_indices, 6, 50, 0);
10// Iterate throug clusters and create point clouds
11for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin(); it != cluster_indices.end(); ++it)
12{
13 pcl::PointCloud<pcl::PointXYZ> cl;
14 for (std::vector<int>::const_iterator pit = it->indices.begin(); pit != it->indices.end(); ++pit)
15 {
16 cl.push_back((*mycloud)[*pit]);
17 }
18 cl.width = cl.size();
19 cl.height = 1;
20 cl.is_dense = true;
21 clustered_clouds.push_back(cl);
22}
Plane model removing#
The passthrough filter removes planes from a cloud.
The corresponding method is the following :
/**
* @brief Remove planes from given cloud based on density
* @tparam PointT Should be a pcl::PointXYZxxx
* @param cloud Cloud to segment
* @param seg_cloud Output segmented cloud
* @param thresh Distance threshold to segment inliers
* @param verbose If has to output debug on console
*/
template <typename PointT>
void segmentPlanes(typename pcl::PointCloud<PointT>::Ptr &cloud, typename pcl::PointCloud<PointT>::Ptr &seg_cloud, float thresh, bool verbose = false);
1segmentPlanes<pcl::PointXYZ>(in_cloud, out_cloud, 0.01, false);